University of Florida/Egm6341/s11.TEAM1.WILKS/Mtg3
EGM6321 - Principles of Engineering Analysis 1, Fall 2010
Mtg 3: Thur, 26 Aug 10
NOTE: - page numbering 3-1 defined as meeting number 3, page 1
- T = torque Fig.p.1-1
- HW*
Eq.(3)P.2-1 : "Ordinary" Differential Equation (ODE)
order = highest order of derivative
Nonlinearity = What is linearity? ; use intuition for now, formal definition soon.
System has 3 unknowns:
Partial Differential Equations (PDE)
3 equations are coupled Numerical Methods
Simplify for analytical solution
2nd Order 2nd Order
nonlinear linear
unknown varying coefficient known varying coefficient






Note: Math structure of coefficient for
is known, but not their values until and are known (solved for)
General structure of Linear 2nd order ODEs with varying coefficients (L2_ODE_VC)




(1) | |

where
independant variable
dependant variable (unknown function to solve for)
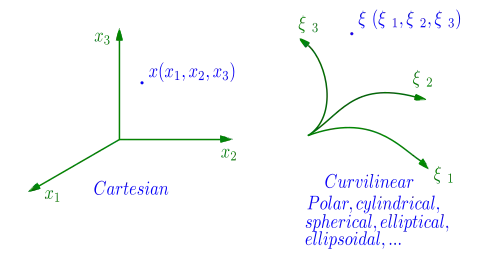
Many applications in engineering are a result of solving PDEs by separation of variables. Some examples include, but are not limited to: Heat, Solids, Fluids, Acoustics and electrmagnetics.
Examples of these types equations are:
the Helmholz equation:
and the Laplace Equation:
Ref F09 Mtg.28, Ref F09 Mtg.29
, Ref F09 Mtg.30





In 3_D,

(1) | |

Where the lowercase in the first term is defined as
and is the separation of variables



(2) | |

Where in the first term is defined as
and is the separation of variables
Separated equations for





(3) | |
![{\displaystyle \displaystyle {\begin{aligned}{\frac {1}{g_{i}(\xi \ _{i})}}{\frac {d}{d\xi \ _{i}}}\left[g_{i}(\xi \ _{i}){\frac {dX_{i}(\xi \ _{i})}{d\xi \ _{i}}}\right]+f_{i}(\xi \ _{i})X_{i}(\xi \ _{i})=0\end{aligned}}}](../../../../I/6bfae4828e6b610b743c2f795dbdcbd3740ca918.svg)
Simplify:
Eq.(3)p.3-3:




(1) | |

Where
Particular case of Eq.(1)p.3-2
Linearity: Let be an operator.
and are 2 possible arguments (could be functions) of
Where and are any arbitrary number.






